
Active MASW
This is the most common type of MASW survey that can produce a 1-D (Park et al., 1999; Xia et al., 2000), 2-D profile (Miller et al., 1999), or 3-D volume (Miller et al., 2003a) shear-wave velocity (Vs) estimates.
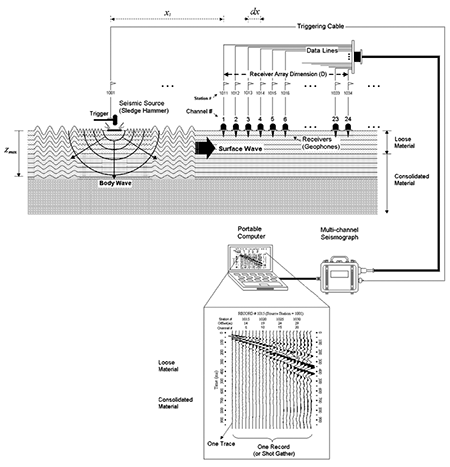
The overall setup is illustrated in Figure 1. The maximum depth of investigation (zmax) that can be achieved is usually in 10-30 m range, but this can vary with sites and types of active sources used. Field procedures and data processing steps are briefly explained below. Some of the field parameters, for example, source offset (x1), spread size (D, i.e., the dimension of the receiver array), and receiver spacing (dx), are described based on the most recent research results and therefore may be different from those previously reported.
Figure 1--Active MASW method.
Surface waves are best generated over a 'flat' ground at least within one receiver-spread length (D) (Figure 2). Then, overall topographic variation within an entire survey line should not matter. However, any surface relief whose dimension is greater than, say, 10% of D will cause a significant hindrance to surface wave generation.
Figure 2--Flat or gentle slopes will be suitable for Active MASW. However, topography can interfere with surface-wave propagation.
Data Acquisition
The following describes most of parameters related to data acquisition. These are the parameters most commonly used at KGS and by no means represent a required set of values. A slight variation in any parameter can always be expected.
Source
A fairly heavy sledge hammer (e.g., 10 lb) will be a good choice, although any other type (e.g., a weight drop) that can deliver more impact power into ground can be an advantage over a sledge hammer because of its potential to generate lower frequencies (longer wavelengths) of surface waves, which equate to greater depth of investigation. The gain from using these other sources is often not enough to warrant the cost of equipment and inconvenience in field operation. Using an impact plate (also called base plate) will help the source impact point become less intrusive into soil. Detailed study on the role of the base plate in surface wave generation has not yet been reported and needs to be undertaken in the near future. In some cases, it has been reported that a non-metallic plate (e.g., a firm rubber plate) can generate noticeably stronger energy at the lower frequency (e.g., < 10 Hz) part of surface waves than the conventional metallic plate.
Acquiring more than one record at a given location using multiple impacts and then summing these records into one (a.k.a., vertical stacking) can suppress ambient noise significantly and is therefore always recommended, especially if the survey takes place in an urban area. The optimum number of stacking impacts can be determined when there is little change in signal-to-noise ratio (S/N) in the displayed seismic record during the stacking. We often use 3-5 vertical stacks at Kansas Geological Survey. We've also noticed that for the purposes of MASW analysis stacking can be even more effective when instead it is applied to the dispersion-curve (a.k.a., Overtone) images, which occurs at a later stage of the surface wave processing. This number, however, should increase as the ambient noise level increases and/or total receiver array length (D) increases.
When available active sources are not able to generate frequencies low enough to meet the depth investigation requirements, then employing Passive MASW in addition to the active survey might be able provide the desired low frequencies (long wavelengths).
Receivers
Current applications of the MASW method are tuned up for the use of vertical (instead of horizontal) phones. Low-frequency (e.g., 4.5 Hz) geophones are generally recommended. The lower the frequencies of the Rayleigh wave the longer wavelengths and thus the greater the depths of investigation. Effectiveness of somewhat higher-frequency (e.g., 10-20 Hz) phones, however, can be equally well suitable for some particular investigations. Ivanov et al. (2008) demonstrated on real seismic data that phase velocities can be estimated at frequencies that are octave and a half lower than the dominant geophone frequency, e.g., using 40 Hz geophones it might be possible to estimate velocities as low as 15 Hz.
Although spike-coupled geophones always give the highest sensitivity, the coupling provided by geophones on metal baseplates (Miller et al., 1999) or in a land streamer (Miller et al., 2003b) can provide low frequencies with sufficient quality for the purposes of MASW analysis. This quality can be convenient in field operations.
Field Geometry
Length of the receiver spread (D) (Figure 1) is directly related to the longest wavelength (![]() ) that can be analyzed, which in turn determines the maximum depth of investigation (zmax). As well,
) that can be analyzed, which in turn determines the maximum depth of investigation (zmax). As well, ![]() (therefore D) in an active survey can also be limited by the seismic source as it is the most governing factor. It is usually in a few tens of meters (e.g., < 30 m) in most cases.
(therefore D) in an active survey can also be limited by the seismic source as it is the most governing factor. It is usually in a few tens of meters (e.g., < 30 m) in most cases.
The penetration depth of ground roll is approximately equal to its wavelength (![]() ) (Richart et al. 1970), whereas shear wave velocities can reasonably be calculated to a depth (Zmax) about half the longest wavelength (
) (Richart et al. 1970), whereas shear wave velocities can reasonably be calculated to a depth (Zmax) about half the longest wavelength (![]() ) measured (Rix and Leipski, 1991; Park et al., 1999).
) measured (Rix and Leipski, 1991; Park et al., 1999).
On the other hand, (minimum if uneven) receiver spacing (dx) is related to the shortest wavelength (![]() ) and therefore the shallowest resolvable depth of investigation (zmin). However, smaller wavelengths can still be observed with the risk of special aliasing when corresponding parts of high-frequency trends can be mistaken for higher-mode instead of aliased energy.
) and therefore the shallowest resolvable depth of investigation (zmin). However, smaller wavelengths can still be observed with the risk of special aliasing when corresponding parts of high-frequency trends can be mistaken for higher-mode instead of aliased energy.
The source offset (x1) controls the degree of contamination by the near-field effects (Park et al., 1999). The sought Rayleigh-wave plane-wave propagation does not occur in most cases until the near-offset (x1) is greater than half the maximum desired wavelength (![]() ) (Stokoe et al., 1994).
) (Stokoe et al., 1994).
A large value of x1 (e.g., > 10 m) and a large D (e.g., > 100 m) can increase the risk of higher-mode domination and reduce S/N for the fundamental mode. Such a development can be a possibility at any particular sight and it might be a good idea to bear that in mind especially when using the Passive MASW method only, which does not have control on the source offset.
Optimum minimum receiver offset and spread size determination extended the spectral analysis of surface waves (SASW) method (which uses only 2 geophones) work (Heisey et al., 1982; Roesset et al., 1989) and has been subject to further research when using the MASW method (Park et al., 2001; Zhang et al., 2004; Xu et al., 2006) to offer recommendations and rules of thumb that could be easily implemented in practice. For example, a most simple but practical--and thus widely accepted--general rule of thumb that has emerged so far is that the spread size should be about the size of depth of investigation and the nearest offset 50% of it (with the understanding that it could be between 25% and 100%) (Ivanov et al., 2008). The latter demonstrates the difficulties with finding a general rule of thumb, which may or may not be applicable at a specific site.
Thorough source offset and spread size testing (Ivanov et al., 2008) may be the most reliable way for finding the optimum field parameters. Moreover, when more channels are available, then using an extra large acquisition field spread, positioning the sources outside and within the spread, and then extracting a shorter optimized spread and source offset roll-along acquisition pattern might be a more efficient way for data acquisition and subsequent processing (Miller et al., 2003a).
Rolling (interval of simultaneous "source"-"receiver spread" movement)
From practice, we most often roll with about 4% of spread size, i.e., when using 24 channels by 1 station (1dx), 48 channels by 2 station (2dx), etc. However, it is the goal of the survey and the required lateral resolution (how often are 1-D Vs estimate needed) that control the rolling.
Recording Parameters
A one millisecond (dt = 1 ms) of sampling interval is most common with a 2-sec total recording time (T = 2 sec). Use a smaller dt (e.g., 0.5 ms) if any body-wave processing (e.g., refraction and reflection) is planned as by-product(s). In the case of extremely low velocities (e.g., Vs < 100 m/sec), a longer T (e.g., 4 sec) will be a better choice. In any case, an excessively long T (e.g., T ≥ 5 sec) is discouraged as it can increase the chance of recording ambient noise (e.g., traffic).
How to Use a Fixed Spread with SurfSeis Software to Emulate a Roll-along Data-acquisition Pattern
If you have estimated the necessary number of seismic spread channels (say, 24) and you have the ability to acquire data using a larger number of channels (say, 48), then you may find it more labor efficient to acquire MASW data using a fixed spread. Seismic records can be obtained by shooting from one end of the spread and then continuing shooting into the spread (moving the source toward the middle of the spread). Then, from the data acquired in such a manner data, record traces can then be extracted (cut) to emulate a roll-along data acquisition pattern with a smaller spread (e.g., having 24 channels).
An example:
Assume the 48 geophones are located on stations 1001-1048 and a total of 13 seismic records were shot (acquired) with the source located at stations 999, 1001, . . . . through 1023 for the records numbered from 101 to 113. SurfSeis can help you pull out (extract, cut) thirteen 24-channel records using the following steps.
- Convert data from seg2 to kgs format (say, line1.dat).
- Apply geometry information (Field Setup) into the trace headers.
- Click 'Display,' then 'Seismic' buttons, and open the converted kgs data file (say, line1.dat).
- 4. Find the "scissors" button located at the top right corner of the window displaying seismic data. (The "scissors" button is located on the row containing the pointing-hand buttons. If you do not see these buttons, click the 'Record. . .' label to activate/deactivate that row of buttons). Click the "scissors" button to display a 'Cut Records' window containing three tabs ('Record,' 'Trace,' and 'Time').
- At the 'Record' tab select the end record at the 'End' drop box, or check the 'All Records' checkbox.
- Click 'Save Output As' button to specify the output file name (the default in this example would be line1(CUT).dat.)
- At the 'Trace' tab select the 'Begin' and 'End' trace numbers (e.g., 1 and 24). At both Increment boxes select 2 (this is because your source moved with 2 geophone intervals, i.e., 999, 1001, etc.)
- Click the 'OK' button to extract (cut) the new set of records each containing now only 24 traces.
- Open the new file (e.g., line1(CUT).dat) and go through the records using the pointing-hand buttons to make sure you have extracted the intended range of traces from each record.
References
Heisey, J. S., K. H. Stokoe, W. R. Hudson, and A.H. Meyer, 1982, Determinatin of in situ shear-wave velocity from spectral anaylysis of surface waves: Center for Transportation Research, The University of Texas at Austin, 256-2.
Ivanov, J., R. D. Miller, and G. Tsoflias, 2008, Some Practical Aspects of MASW Analysis and Processing: Symposium on the Application of Geophysics to Engineering and Environmental Problems, 21, 1186-1198.
Miller, R. D., T. S. Anderson, J. Ivanov, J. C. Davis, R. Olea, C. Park, D. W. Steeples, M. L. Moran, and J. Xia, 2003a, 3-D characterization of seismic properties at the smart weapons test range, YPG: 73rd Annual International Meeting, SEG, Technical Program Expanded Abstracts, 22, 1195-1198.
Miller, R. D., K. G. Park, J. Ivanov, C. B. Park, D. Laflen, and R. F. Ballard, 2003b, A 2-C Towed Geophone Spread for Variable Surface Conditions: Symposium on the Application of Geophysics to Engineering and Environmental Problems, 16, 1276-1284.
Miller, R. D., J. Xia, C. B. Park, and J. M. Ivanov, 1999, Multichannel analysis of surface waves to map bedrock: The Leading Edge, 18, 1392-1396.
Park, C. B., R. D. Miller, and J. Xia, 2001, Offset and Resolution of Dispersion Curve in Multichannel Analysis of Surface Waves (MASW): Symposium on the Application of Geophysics to Engineering and Environmental Problems, 14, SSM4.
Park, C. B., R. D. Miller, and J. H. Xia, 1999, Multichannel analysis of surface waves: Geophysics, 64, 800-808.
Rix, G. J., and A. E. Leipski, 1991, Accuracy Accuracy and resolution of surface wave inversion; in, B. S. K. a. B. G.W., ed., Proceedings of Sessions Sponsored by the Geotechnical Engineering (Geotechnical special publication) American Society of Civil Engineers, 17-23.
Roesset, J. M., D. W. Chang, K. H. Stokoe II, and M. Aouad, 1989, Modulus and thickness of the pavement surface layer from SASW tests: Transportation Research Record, 1260, 53-63.
Stokoe, K. H., II , G. W. Wright, J. A. Bay, and M. R. Roesset, 1994, Characterization of geotechnical sites by SASW method; in, R. D. Woods, ed., Geophysical characterization of sites: A. A. Balkema, 15-25.
Xia, J., R. D. Miller, C. B. Park, J. A. Hunter, and J. B. Harris, 2000, Comparing shear-wave velocity profiles from MASW with borehole measurements in unconsolidated sediments, Fraser River Delta, B.C., Canada: Journal of Environmental and Engineering Geophysics, 1, 1-13.
Xu, Y. X., J. H. Xia, and R. D. Miller, 2006, Quantitative estimation of minimum offset for multichannel surface-wave survey with actively exciting source: Journal of Applied Geophysics, 59, 117-125.
Zhang, S. X., L. S. Chan, and J. H. Xia, 2004, The selection of field acquisition parameters for dispersion images from multichannel surface wave data: Pure and Applied Geophysics, 161, 185-201.