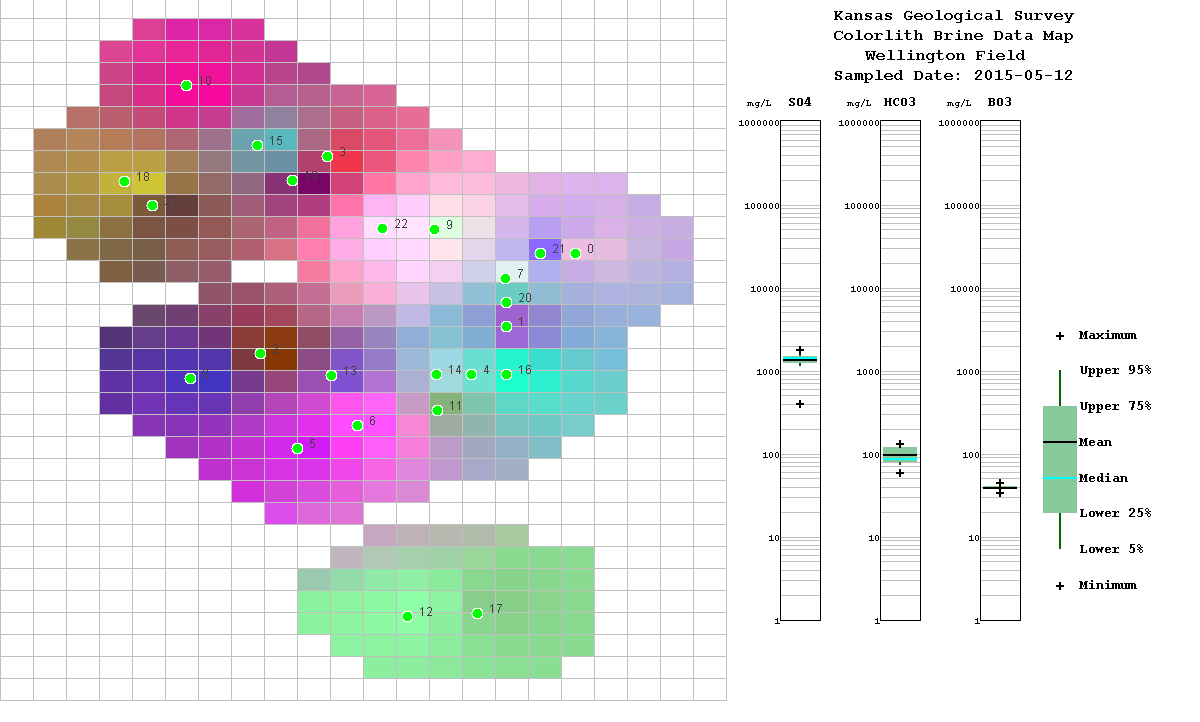
This gridding and mapping module allows the user to plot the brine data for
the CO2 Project Wells Map. The map displays a colorlith presentatiion
of the brine data, i.e. 3 brine data curves mapped to 3 colors Red, Green and Blue
respectively and mixes the color to reflect the general chemistry. The idea is that
by picking and plotting the right three curves that may be especially sensistive
to the brine chemistry and reflect the CO2 interaction and see a change
in the presentaion on the map by the color change.
The map below shows the mixing of (Sulfate, Bicarbonate and Borate) as a mix of
(Red, Green and Blue) respectively. This program allows the user to modify the
minimum and maximum of each of the colors to reflect the best presentation of the
data change over the well map. The bar and whisker plot reflect the statistics
of the data, i.e., Minimum, Maximum, Mean, Medium, etc.
Gridding Algorithm
The interpolation algorithm is a simple inverse distance weighted
averaging algorithm as described in Davis (1986). By default an
inverse distance-squared weighting is used, but you have the
option of changing the exponent (Inverse Distance Weighting
Exponent on the Gridding Parameters Frame) so that, for example,
you could use inverse distance (exponent=3) weighting. The
effects of varying the exponent are described in Davis (1986). A
simple nearest neighbor search is employed. The maximum number
of nearest data points to use in estimating the parameter value
at a grid node is specified as Number of Nearest Neighbors
in the Gridding Parameters Frame. By default, eight nearest
neighbors are used. Two additional parameters that control the
search algorithm are the maximum allowable distance from the
estimation point (grid node) to the nearest data point (Maximum
Distance to Nearest Data Point) and the maximum
search radius (Maximum Search Radius). If no data points
are found within the maximum allowable distance to the nearest
data point, then the algorithm will search for data points until
either the number of data points specified in the Number of
Nearest Neighbors box is found or until there are no points
left within the specified maximum search radius, whichever happens
first. The default value for the maximum allowable distance to
the nearest data point is set so that, on average, twice the
number of data points specified as Number of Nearest Neighbors
would fall within this radius assuming a uniform distribution
of data points across the map area. The default maximum search
radius would contain, on average, five times the specified number
of nearest neighbors under the same assumption. These are the same
criteria used to set the default search neighborhood values for
the nearest neighbor search in Surface III (Sampson, 1988).
|
References
- Davis, J.C., 1986, Statistics and Data Analysis in Geology,
Second Edition, John Wiley & Sons, New York, 646 pp.
- Sampson, R.J., 1988, Surface III User's Manual, Kansas
Geological Survey, 277pp.
|
Author: John R. Victorine jvictor@kgs.ku.edu
The URL for this page is http://www.kgs.ku.edu/PRS/Ozark/Software/GRID_LAB/index.html